FANUC Upside Down Robot Setup
Ever need to Invert Mount a robot? Make sure you set it up in
your Controlled Start Maintenance settings!
FANUC Cell Interface, IF Statements, Handshaking
Okay, hodge podge video here.... discussing built in Handshaking
between your FANUC Robot and a PLC, HMI, Tooling, Valves, etc.
FANUC BZAL Recovery
Fairly quick and easy way to recover your mastering after
battery power loss on your robot.
FANUC to Rockwell PLC Ethernet Setup and Program Calls
Ethernet IP setup for quick and easy method to call programs on
your FANUC Robot from an Allen Bradley PLC or other discrete
input source. Works on CompactLogix, ControlLogix, GuardLogix,
and more.
FANUC Jump Label
A brief tutorial on the functionality of using FANUC Jump Label
and Label instructions.
Understanding OFFSETS in FANUC TP Code
Our FANUC green Collaborative CR-7 shows us how useful Offsets
are in optimizing code.
FANUC Copy + Paste, Edit Commands (and more!)
In this video, learn how to efficiently create code quickly by
using Copy, Paste, (Reverse Paste), as well as user friendly
tricks like Remark, Undo, and more.
15:41
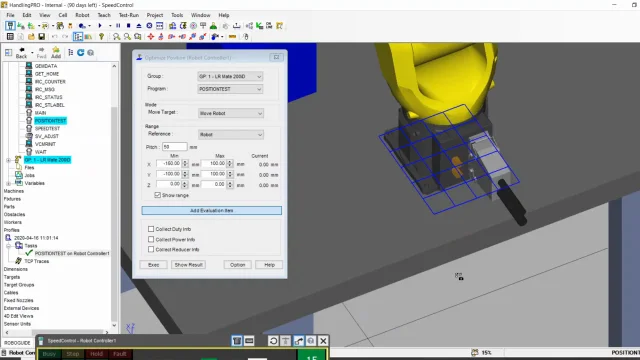
FANUC Optimizing Robot Position
Use FANUC RoboGuide software to take the guesswork out of
designing your workcell. With our Optimize Position Utility
tool, FANUC software can output a detailed report on the best
position to place your robot within your 3D layout.
FANUC Robot Homing Program
A simple example showing basic tips on how
to autonomously and safely get your robot to a home position
after a cycle interruption.
FANUC Backup and Restore Files
This video covers the quickest and easiest way to take and
transfer backup files from your FANUC Robot. This could be used
to copy or duplicate an existing cell, or simply to recover
programs and settings that may have been changed.
FANUC User Frame Setup and Strategy
Why should I use User Frames? How do I set them up? What
advantage do I gain? All these answers and more in this video
about setting up and using FANUC User Frames.
FANUC Mastering
New robot? Lost batteries? FANUC BZAL alarm? Look no further. In
this video I cover Zero Axis Mastering, Quick Mastering,
Reference Position, and more, to get you up and running again.
Group I_O Position Control
This video covers the ability to use basic Group I/O (all
binary bits) to send positional commands to your FANUC robot.
Send positions to your robot over Ethernet, Profinet, Profibus,
Modbus TCP, etc., using standard integers.
FANUC Touch Skip
Formerly Collision Skip, and AKA Touch Sensing for non-cobot
models.
FANUC BG Logic Timer Hack
Timers do not work in FANUC Background Logic, but we can make
our own.... check out this fun life hack to work around a BG
Logic Timer issue.
FANUC Simulate I/O, Comment Code
Video on how to "Force" or "Simulate" I/O signals. A quick
little bonus footage in the last 2 minutes on how to "Comment"
or "Remark" out lines of code for testing purposes.
How to view programs in NotePad, LS Files
Quick, easy, and FREE way to view your programs on any standard
word editor. The secret sauce: print to LS.
Cartesian vs. Joint Representation - Let the Debating Begin!
This is an in-depth look at teach positions in "Joint"
representation versus "Cartesian" representation, and how each
has their benefits.
FANUC Passing Arguments
Tips and tricks on passing arguments as a variable for modular
code.
How I perform a quick Reach Study
Sometimes people just need a quick look, a sanity check, for
"am I considering the right robot size?". That's where RoboGuide
comes in. Watch as I pop together a quick 3D layout to verify if
this M-20iD will get the job done or if we need a size bigger
model.
Cartesian vs. Joint Representation - Let the Debating Begin!
This is an in-depth look at teach positions in "Joint"
representation versus "Cartesian" representation, and how each
has their benefits.